A műholdas helymeghatározás elve, és gyakorlati alkalmazása
Bartha Csaba, Geopro Kft.
1. GPS a helymeghatározás legkorszerűbb eszköze
4. Helymeghatározási módszerek
A földrajzi helymeghatározás többezer éves története során az elmúlt 35 év fejlesztései eredményezték a legnagyobb változást mind a módszerek, mind a lehetőségek tekintetében.
A hagyományos, földi pontról földi pontra történő mérések mellet megjelentek az űrtechnika melléktermékei, a kozmikus és szatellita módszerek.
A mesterséges holdról történő helymeghatározás elvét mutatja az alábbi ábra.
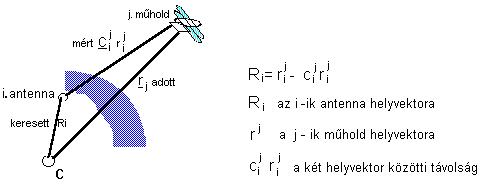
Az i. állásponton működő vevőkészülék méri a műhold pillanatnyi távolságát és irányát, vagyis az r irányvektort. Amennyiben ismerjük a műhold koordinátáit, a vevő koordinátái ugyanabban a koordinátarendszerben számíthatók. Mivel a szatellitamódszerek közül pillanatnyilag egyik sem képes az r irányvektor mindhárom komponensét egyidőben szolgáltatni, ezért ha távolságmérést alkalmazunk, a vevőnek egyidőben 3 ismert koordinátájú műhold távolságát kell mérni. A GPS módszer esetében ez 4 műhold egyidejű mérését jelenti, mivel negyedik ismeretlenként kezeljük a vevőnk órájának eltérését a GPS rendszeridőtől.
A mesterséges holdak koordinátái tetszőleges időpontra számíthatók a hold
által sugárzott jelek kódolt paramétereiből. Ezek a koordináták geocentrikus,
derékszögű X, Y, Z koordináták, melyek a WGS 84 referencia rendszerre
vonatkoznak. A GPS mérések eredményeként elsődleges adatként WGS 84 rendszerben
értelmezett geocentrikus, derékszögű X, Y, Z koordinátákat kapunk. Ezekből, - a
megfelelő transzformációs paramétereket ismerve - tetszőleges dátumra,
alaprendszerre vonatkoztatott koordinátákat számíthatunk.
A GPS technika a mesterséges holdak által kisugárzott rádiójelek vételén alapul.
A GPS holdak fedélzetén elhelyezett oszcillátorok f 0= 10.23 MHz alapfrekvencián működnek, rádiójeleket azonban két különböző frekvencián sugároznak. Az L1 és L2 jelűn. Az L1 frekvencia az alapfrekvencia 154 -szerese, az L2 120 - szorosa.
L1ŕ f1 =154 f0 = 1575.42 MHz.
L2ŕ f2 =120 f0 = 1227.60 MHz.
Ennek megfelelően a hullámhosszak: l 1= 19.0 cm és l 2= 24.4 cm. Ezeket a vivőhullámokat (carrier) különböző kódokkal modulálják annak érdekében, hogy információkat továbbíthassanak a vevők felé. A kódok +1 és -1 értékekből álló sorozatok, a kettes számrendszerbeli 0 és 1 számjegyeknek megfelelően.
A kódolás elve a fázis billentyűzés ( biphase modulation ), azaz a vivőhullám fázisának 180 fokkal való eltolása akkor, ha a kód értéke ( +1 vagy -1 ) változik.
A fázisbillentyűzés elvét az alábbi ábra szemlélteti.
A vivőhullám modulálásakor kétféle kódolást alkalmaznak. A C/A kód ( coarse/acquisition code ) frekvenciája f 0/10, azaz 1.023 MHz - es frekvenciával követik egymást a +1 és -1 értékek. A kódsorozat minden ezredmásodpercben ismétlődik, és minden GPS hold esetén különböző. Ez teszi egyértelműen azonosíthatóvá a holdakat.
A P - kód (precision code) frekvenciája megegyezik az f 0 alapfrekvenciával, és 266.4 naponta ismétlődik. A holdak azonosítását itt az teszi lehetővé, hogy a kód " mintája" minden hold esetében egyedi. A P - kód teljes, 266.4 napos ciklusának 7-7 napos darabját rendelték hozzá egy egy GPS holdhoz. A kód generálása minden vasárnap éjfélkor, a GPS hét kezdetén újra indul. A mesterséges holdakat azonosító PRN ( pseudorandom noise ) szám éppen arra utal, hogy a teljes P - kód melyik egyhetes szakaszát rendelték a holdhoz.
Néhány éve új fogalom került a köztudatba, ez az Anti -Spoofing ( A -
S). Az Anti Spoofing a P kód titkosítása annak elkerülése céljából, hogy valaki
hamis információ sugárzásával illetéktelenül beavatkozhasson a rendszerbe. A
titkosítás eredménye az Y kód, melyet csak a titkos konverziós algoritmus
ismeretében lehet megfejteni.
Eddig a GPS holdak jelsugárzásának módjairól beszéltünk. A felhasználó számára legalább ilyen fontos kérdés, hogy hogyan juthat hozzá a jelek által hordozott információhoz, azaz hogyan működik a GPS vevő.
A GPS két típusú mérést képes végezni. Az egyik az úgynevezett kód korrelációs technika, amely megkívánja legalább az egyik PRN kód ismeretét, a másik a kód nélküli technika. Minkét eljárás alkalmas a vivőhullám rekonstruálására, így annak fázisa meghatározható.
A kód korrelációs technika a modulálatlan vivőhullám mellett a jel többi komponensét ( navigációs üzenet, órajel ) is megfejthetővé teszi. Az eljárás alaplépései a következők:
- referencia rezgés keltése a vevőben
- a referencia rezgés modulálása az ismert PRN kóddal
- az ilyen módon kódolt referencia jel összehasonlítása ( korrelálása ) a műholdról vett jellel; a két jel kközötti időeltolódás (D t ) jelenti a műholdról érkező hullámok terjedési idejét
- a kód eltávolítása a vett jelből, így a navigációs üzenet dekódolható, majd kiszűrhető
- megmarad a modulálatlan vivőhullám, a fázismérés végrehajtható.
Amennyiben a C/A kódot ismeri a vevő, az L1 vivőhullám rekonstruálható. A P kód ismeretében az L1 és L2 is.
A kód nélküli eljárás a bejövő jelek négyzetelésén ( squaring ) alapul. A kódolás, vagyis a moduláció eltűnik, mivel a kódok +1 és -1 jelsorozatai négyzetre emelés után +1-et adnak. A moduláció megszűnése mellett a frekvencia megkétszereződése érdemel figyelmet. A négyzetelő eljárás előnye hogy független a kódoktól, hátránya hogy a jel/zaj viszony csökken. A két technika együttes alkalmazása is elképzelhető: az L1 vivőhullám rekonstruálása a C/A kód korrelációval, az L2-é négyzeteléssel.
A GPS mérési adatok valójában távolságok, amelyek a vevőben eőállított, illetve a vett jelek összehasonlításával, idő- és fáziskülönbség mérése alapján határozhatunk meg. A GPS mérés egyutas módszer, amelyet a műhold és a vevő órajárási hibái befolyásolnak. Ezért a GPS-mérte, órahibákkal terhelt távolságokat pszeudo távolságoknak, ( pseudorange, áltávolság) nevezzük.
4. HELYMEGHATÁROZÁSI MÓDSZEREK
A meghatározási módszereket az alábbiak szerint csoportosíthtjuk:
- abszolút vagy relatív
- statikus vagy kinematikus
Az abszolút helymeghatározás egy független, egypontos meghatározás, ahol a koordinátákat kódmérésből, pszeudotávolság meghatározásból kapjuk a WGS-84 koordinátarendszerben, a méréssel egyidőben. Ehhez a mérési módszerhez egy vevőkészülék szükséges.
A relatív helymeghatározás a pszeudotávolság, vagy vivőfázis szimultán mérését jelenti két vagy több ponton, ugyanazon holdakra. Ehhez a mérési módszerhez legalább két vevőkészülék szükséges. Fázismérésnél a relatív pontosság 1 ppm.
A kapott koordináták a referenciaponthoz viszonyított értékek.
Statikus mérési módszernél a vevő az észlelés teljes ideje alatt helyben marad, tehát sok fölös mérési eredmény adódik.
Kinematikus módszernél a vevőkészülék folyamatosan mozog, fölös mérés nincs.
Az abszolút statikus módszernél 1s-os mérési idő alatt a
helymeghatározás pontossága valósidejű mérésnél:
| C/A kóddal: |
20 - 50m
|
| P kóddal: |
5 - 20m
|
Ha a mérési adatok feldolgozását később végezzük, és pontos pályaelemekkel számolunk,akkor amegbízhatóság 2 - 5m lesz. Mivel a C/A kód használata 10-es faktorral gyengíti a pontosságot, P kód használata civil alkalmazóknak nem áll rendelkezésére, ezért ezt a meghatározási módot geodéziai merésekhez nem használjuk.
Az abszolút - kinematikus módszerrel 1 ms -os mérési idő alatt a maximálisan elérhető pontosság 20 - 50 méter. E pontosság eléréséhez a mozgásban lévő vevőnek folyamatosan, szimultán 4 műholdra kell mérnie. Ez a mérési módszer széleskörűen elterjedt a vízi, szárazföldi és léginavigációban. Ezzel a módszerrel a járművek mozgási pályáját lehet meghatározni.
A relatív statikus módszernek van a legnagyobb jelentősége geodéziai szempontból, főleg fázismérés esetében, mert így érhető el maximális pontosság GPS -szel. Rövidebb bázisok esetében centiméter alatti. Precíz pályaelemeket használva a pontosság tovább javulhat, elérheti akár a 0.01 ppm -et is.Ez a módszer széleskörűen alkalmazható alappontsűrítésnél, hagyományos terepfelméréseknél, ipari geodéziában, fotogrammetriában.
A relatív - kinematikus módszer alkalmas a vevő útvonalának rövid idö alatt való meghatározására. A mérést egy álló, és egy mozgó vevővel végezzük. A mérés kezdetekor két ismert ponton abszolút kinematikus módszerrel meghatározzuk a koordinátákat. Ezután az egyik vevőantennát a kezdőponton hagyjuk, a másikkal pedig pontról pontra haladva folyamatos mérést végzünk.Egy - egy új ponton megállva, a mérés időtartama néhány másodperctől 1 percig terjedhet. Vivőfázis mérésekor az elérhető pontosság néhány centiméter, kódméréssel néhány méter. Mivel ezzel a módszerrel nagy számú pont gyors és pontos meghatározása lehetséges, nagy jövője van a geodéziában.
A kinematikus módszernek több változatát is kidolgozták, melyeket a különböző elnevezéseikkel ismertetek.
Stop and go ( félkinematikus módszer )
Ez a módszer a statikus és a kinematikus relatív helymeghatározások kombinációja.
A mérés során az egyik vevő végig egy ponton áll, a másik az új pontok között mozog, majd rövid időre az új ponton megáll. A módszer jellemzője, hogy a meghatározás pontossága az álló helyzetben végzett mérésnél növekszik, mivel az eredmény több mérési adat átlagából születik. Ezt a mérési módszert gyakran csak kinematikus felmérésnek nevezik. ( kinematic surveying )
Pszeudokinematikus, vagy megszakított kinematikus módszer
Az új pontokon sorban, egymás után mérnek, majd mintegy egy óra elteltével fordított sorrendben újra mérnek. Í gy lehetővé válik a többértelműség felolása, javul a pontosság. Ennek oka, hogy a várakozási időben változik a holdak konstellációja.
E mérésnél a pontok közötti átállás időtartamára a vevők kikapcsolhatók. Ez a mérési módszer reokkupációs módszer néven is ismert. ( reoccupation method )
Gyors statikus módszer
Itt a gyors inicializáláshoz, azaz a többértelműség feloldáshoz a kód - és vivőfázis mérések kombinációját alkalmazzák. Itt az egyébként hagyományos statikus módszerrel végzett mérésnél mindkét frekvencián mérni kell a vivőfázist, és a kódot is. 5 -10 perces mérés után 1 ppm megbízhatóság érhető el.( fast static, rapid static)
On the fly ( OTF ) módszer
Ez egy inicializálási módszer, melyet főleg kinematikus méréseknél alkalmazunk. Ez a kóddal segített technika, amely a többértelműség feloldására szolgál, lehetővé teszi mozgó járművek helyzetének deciméter, sőt centiméter pontosságú meghatározását.
5. MILYEN PONTOS A GPS ?
Aki először érdeklődik a GPS technika iránt, nem mulasztja el feltenni a kérdést: milyen pontosságú pontmeghatározás érhető el GPS - szel ? A válasz nem egyszerű. Ennek az az oka, hogy a GPS - nek sokféle gyakorlati alkalmazása létezik. Minden alkalmazásnak más a célja, technikai feltétele, és ezért a pontossága is. Ahhoz, hogy az adott célnak, a megkívánt pontosságnak legmegfelelőbb módszert választhassuk, el kell igazodnunk a GPS mérési módszerek között. Ezt a tájékozódást segíti néhány alapvető fogalom definíciója (Hofmann-Wellenhof, 1992 alapján) és egy grafikon, amelyről a helymeghatározás pontosságára vonatkozó adatok leolvashatók. ( Stansell, 1988 )
A kódmérésről és a vivőfázis mérésről már volt szó. Emlékeztetőül annyit, hogy a kódmérés pontossága durván méteres, a fázismérésé milliméteres nagyságrendű. A fázismérésnél fellép a többértelműség problémája, melynek feloldására számos megoldás született, a kutatás tárgya ma is.
A valós idejű (real - time) alkalmazások megkövetelik, hoga a vevő azonnal, a mérés helyszínén, rövid időn belül határozza meg helyzetét. Az azonnal szigorúbb definíciója azt jelenti, hogy egyetlen időpontban végzett mérés alapján, elhanyagolhatóan rövid számítási idő után szolgáltassa a vevő pozícióját. A GPS eredeti koncepciója ugyanis mozgó jármű ( hajó, repülőgáp, autó, stb ) valós idejű navigációja. Utólagos feldolgozással ( postprocessing ) a lehetőségek bővülnek. A tárolt mérési adatokat kombinálni lehet más pontokon mért adatokkal, így bizonyos hibaforrások jelentősen csökkenthetők, a pontosság növelhető. Egyedi pontmeghatározásról ( point positioning ), vagy a magyar szakirodalomban elterjedt kifejezéssel élve abszolút pontmeghatározásról akkor beszélünk, ha egyetlen ponton álló vevővel, általában kód korrelációs technikával egyszerre minimálisan négy GPS holdra végzünk méréseket, és a pont koordinátáit ezekből számítjuk ki. A relatív pontmeghatározás előfeltétele , hogy legalább két ponton folyjon fázismérés ugyanazon GPS holdakra. Az egyik pont koordinátái rendszerint nagy pontossággal ismertek ( ez a referencia pont ), a másikéi ismeretlenek. A módszer valójában a két pont közötti vektort adja meg, innen a relatív elnevezés. A feldolgozási módszer a mérésekből képzett különbségekkel való számításon alapul, melynek során bizonyos hibák eltűnnek, vagy hatásuk jelentősen csökken. Szokás differenciális pontmeghatározásról beszélni, ha hasonló eljárást alkalmazunk, kódméréssel kapott pszeudo távolságok felhasználásával. A " relatív" és " differenciális" elnevezések sajnos sokszor keverednek egymással.
Statikus pontmeghatározás alatt azt értjük, hogy a vevő a mérendő ponton áll, míg kinematikus tecnikáról van szó, ha a vevő mozog mérés közben. Néhány tipikus mérési módszert sorolunk fel:
- statikus abszolút pontmeghatározás
Viszonylag rövid mérési idő után, mérsékelt ( 5 - 10 m ) pontosságot érhetünk el, kódméréssel.
- kinematikus abszolút pontmeghatározás
A kódmérések felhasználásával, mozgó járművek helyzetét 10 - 100 m-es pontossággalhatározhatjuk meg.
- statikus relatív pontmeghatározás
Vivőfázis mérések felhasználásával történik. A geodéziában ez a leggyakrabban alkalmazott módszer, melynek segítségével a GPS szélső pontossága ( 1 ppm...0.1 ppm ) elérhető. 1 ppm ( egy milliomodrész ) pontosság néhány kilométeres bázisvonalon néhány milliméter hibát jelent. Két vagy több álló vevő közötti vektor meghatározásán alapul. Az így kapott koordináták természetesen öröklik a referencia pont koordinátáinak esetleges pontatlanságát.
- kinematikus relatív ( vagy differenciális ) pontmeghatározás
Egy álló referencia vevő, és egy mozgó műszer ( rover ) szimultán mérése. A relatív technika miatt a pontosság nagyobb mint az abszolút eljárás esetén. Fázismérés esetén a pontosság elérheti a centiméteres, kódméréssel ( ezt nevezzük differenciális technikának ), a méteres nagyságrendet.
A szakaszok közepén lévő kör jelzi a legvalószínűbb értéket, az eredmények
5-5 % -a lehet roszabb ill. jobb, mint amit a szakaszok két végpontja jelöl.
Felhasznált irodalom: Földmérési és Távérzékelési Intézet Kozmikus Geodéziai Obszervatórium GPS tanfolyam jegyzet 1993 - 94